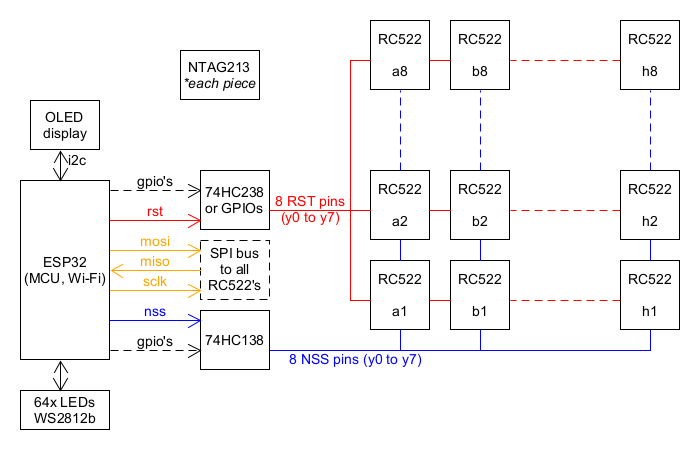
3D-printed Chess Board with Piece Recognition and Connection with Lichess
main controller: ESP32-WROOM w/ OLED display
RFID reader: mini RC522 modules
piece RFID: NTAG213 stickers
diagram:
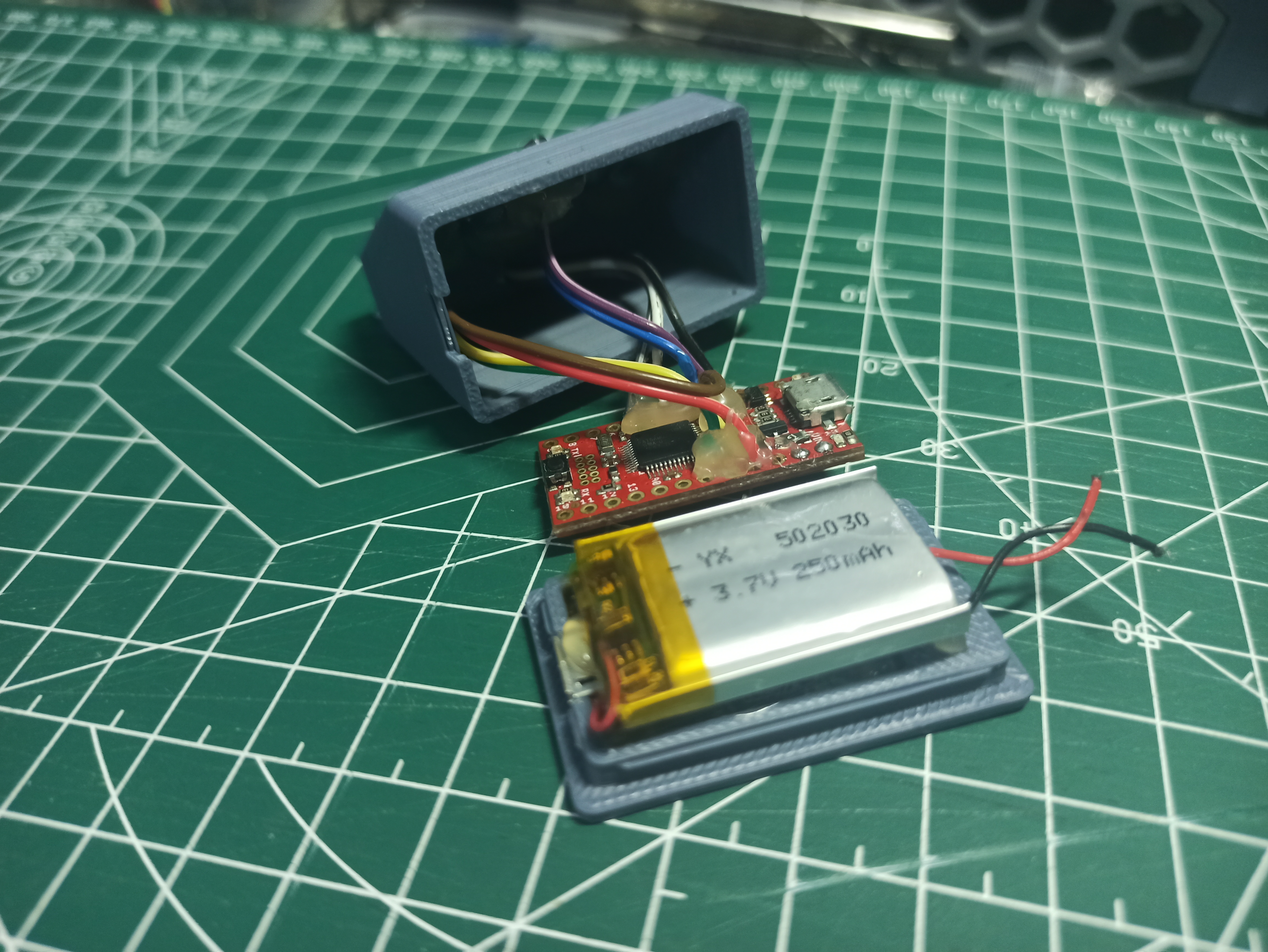
part 1: Assembly
part 2: Demo
3D-printed Chess Board with Piece Recognition and Connection with Lichess
main controller: ESP32-WROOM w/ OLED display
RFID reader: mini RC522 modules
piece RFID: NTAG213 stickers
diagram:
part 1: Assembly
part 2: Demo
3D-printed WALL-E replica - Wi-Fi controlled using ESP32, with OLED display and audio output.
main controller: ESP32 DEVKIT (with local web server)
motors: 2x 37GB520 (wheels/tracks - driven using TB6612FNG) and 7x MG90S servos
other accessories: 1x OLED display, 1x microSD interface, 1x audio-amplifier
credits:
original 3D design: thingiverse.com/thing:3703555
DIY rechargeable mini-chess-clock using SAMD21 mini board and 0.91" 128x32 OLED display.



Cheap CMSIS-DAP/DAPLink SWD module based on NS32F103CBT6 (an STM32-clone?). It has both a debugger and a serial/UART port on a single USB device just like the J-Link OB v2 debugger (based on STM32F072) - better than those ST-Link debugger clones.

MCU interface:


Firmwares:
(*should work also on chips with smaller ROM STM32F103C8 (like the BluePill C8)
Tested only on Ubuntu host.
sample kernel logs if using original FW:
usb 1-1: new full-speed USB device number 44 using xhci_hcd
usb 1-1: New USB device found, idVendor=c251, idProduct=f001, bcdDevice= 1.00
usb 1-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
usb 1-1: Product: CMSIS_DAP
usb 1-1: Manufacturer: CMSIS-DAP by ARM
usb 1-1: SerialNumber: 202108120001
cdc_acm 1-1:1.0: ttyACM0: USB ACM device
hid-generic 0003:C251:F001.0015: hiddev0,hidraw2: USB HID v1.00 Device [CMSIS-DAP by ARM CMSIS_DAP] on usb-0000:00:14.0-1/input2
Sample kernel logs if using the modified FW:
usb 1-1: new full-speed USB device number 52 using xhci_hcd
usb 1-1: device descriptor read/64, error -71
usb 1-1: new full-speed USB device number 53 using xhci_hcd
usb 1-1: New USB device found, idVendor=0d28, idProduct=0204, bcdDevice= 1.00
usb 1-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3
usb 1-1: Product: DAPLink CMSIS-DAP
usb 1-1: Manufacturer: ARM
usb 1-1: SerialNumber: 20220218979699080605210b3030153632303030
cdc_acm 1-1:1.0: ttyACM0: USB ACM device
usbcore: registered new interface driver cdc_acm
usbhid 1-1:1.2: couldn't find an input interrupt endpoint
usbcore: registered new interface driver usbhid
usbhid: USB HID core driver
Sample openocd configuration:
source [find interface/cmsis-dap.cfg]If using the original FW, need to add these on the configuration:
transport select swd
source [find target/stm32f4x.cfg]
adapter speed 4000
init
targets
reset halt
cmsis_dap_vid_pid 0xc251 0xf001
cmsis_dap_backend hid
Not tested:

Reference:



[ 2555.447630] usb 1-1: new high-speed USB device number 13 using xhci_hcd [ 2555.601320] usb 1-1: New USB device found, idVendor=048d, idProduct=9308, bcdDevice= 1.00 [ 2555.601325] usb 1-1: New USB device strings: Mfr=1, Product=2, SerialNumber=3 [ 2555.601329] usb 1-1: Product: DGI1011 [ 2555.601331] usb 1-1: Manufacturer: Atlanta DTH, Inc. [ 2555.601333] usb 1-1: SerialNumber: 000000








